2024.10.22
SLAMとは何か?SLAM技術を強化するセンサの役割と選び方とは?
WEBマガジン事例紹介イメージング部品・センサ

- この記事の監修者
- コーンズテクノロジー編集部
- コーンズテクノロジーでは先進的な製品・技術を日本産業界へ紹介する技術専門商社として、通信計測・自動車・防衛セキュリティ・電子機器装置・航空宇宙・産業機械といった技術分野のお役立ち情報を紹介しています。
-


SLAM技術は、自動運転車両、ドローン・UAV、無人搬送車(AGV)やロボティクス分野での重要な技術として注目されています。一方で、このSLAMの能力を最大限に引き出すためには、適切なセンサの選定が不可欠です。
この記事では、SLAMの基本的な技術の説明から、SLAMに使用される各センサの特性まで、SLAMの最適化に役立つ情報をご提供いたします。また、SLAM技術を強化するためのセンサの種類や役割、選び方について詳しく解説します。
SLAMとは、地図を作成しその中で自身の位置を把握する技術
人の手によりロボットがある場所に置かれた際、ロボットは自分がどこにいるか分かりませんし、周りに何があるかも分かりません。しかし、もしロボットに周囲をスキャンするセンサを備えていれば、自分の周りにどのような障害物があるのか把握できます。また、ロボットが移動したときに移動量が分かれば、移動量に応じて周囲の物体からどれだけ離れたか、もしくは近づいたかが分かります。
こうした周囲のマッピングを行うことで周辺地図を作るとともに、その地図内で自分がどこにいるかを把握する技術を、SLAM(Simultaneous Localization and Mapping)といいます。無人搬送車(AGV)などにすでに導入され、広く使われている技術です。自動運転車両・自律走行車両などにも使用されており、今後さらに一般的な技術になると想像できます。
身近なSLAMの使用例
SLAMは身近なものでは、家庭用のお掃除ロボットやドローンの障害物探知・自動操縦、工場内で活躍するロボットなどに搭載されています。具体的には、お掃除ロボットの場合、カメラや超音波センサ、レーザー光の反射を測定して周囲の状況を把握するLiDARなどがSLAMとして搭載されており、カメラが壁や天井など部屋の特徴点を記録し、LiDARが物体までの距離や部屋全体の間取り認識をするためのスキャンしマッピングを行い、移動・掃除を行います。その他にも、人が一定の操縦をしなくても動くことができる自律走行車両では、道路や側道、周辺の自動車の有無や地形などを把握し、ぶつからないように回避しながら運転することを可能にするため、高性能なLiDARがSLAMに使用されています。
このように、現在SLAMは多くのシーンで活用されていますが、SLAMで使用されるセンサは前述のLiDAR以外にもさまざまあり、それぞれ得意分野が異なり、用途により使い分けが大切で、センサごとに課題が存在します。以降では、SLAMの種類や定義、課題などについて解説していきます。
大きく3つあるSLAM技術の種類とそれぞれの課題
SLAMに使用されているセンサの技術には、「LiDAR SLAM」「Visual SLAM」「Depth SLAM」の3種類があります。それぞれセンシング技術が異なっており、センシングにより得られる情報にも違いがあります。これらのセンサに使用されている技術の違いを解説します。

LiDAR SLAM
LiDAR(Light Detection and Ranging)SLAMは、レーザー光を放射し、対象物からの反射光を受け、その間にかかった時間を測定することで物体までの距離を測定します。レーザー光の照射範囲(FoV)を広げ、取得する点群の密度を上げることで周囲の状態を高精度で測定できるため、広範囲・高精度な3D地図を作成することが可能となります。また、センシングにレーザー光を用いることで昼夜を問わずにセンシングができるため、さまざまな環境下で使用できる汎用的な技術だと言えます。実際、前述の自動運転車両・自律走行車両を始め、地形解析や各種3Dモデルの作成など、さまざまな用途ですでに使用されています。
また、LiDAR SLAMはカメラと異なり、レーザーが当たった対象を点の集合体として認識するので、人の存在を認識するが、誰であるかは特定しないため、プライバシーの観点でも有用です。一方で、LiDAR SLAMの課題としては、高額になる傾向がある点と、レーザー光が散乱しやすい雨、霧、雪などの気象下で測定がしづらくなる傾向があります。
Visual SLAM
Visual SLAMは、カメラで撮影した画像データを用いて視覚的な特徴を抽出し、それをもとに地図を生成します。カメラの画像を利用するため、比較的低コストで実装可能という特徴があります。また、スマートフォンなどの小型デバイスにも搭載できるため、さまざまなシーンで活用できます。具体的なVisual SLAMの活用シーンとしては、ドローンでの障害物認識はもちろん、ロボット等への組み込みで工場や倉庫での省力化、スマートフォンなどへの組み込みでAR/VRの実現などがあります。
ただし、カメラの解像度が低いとマッピングや位置推定の精度も落ちるので、精度よくSLAMを行うためには解像度の高いカメラを使用する必要があります。また、カメラ一台だけで撮影した場合は平面の情報しか得られないため、立体的な情報を得たい場合は複数台のカメラで撮影する必要(ステレオカメラ化)があります。センシングが画像であるため、距離に関してはLiDAR SLAMほど正確ではなく、雨天や夜間など写真がうまく撮れない環境では精度が落ちる欠点もあります。
くわえて、正確なマッピングと位置推定を行うためには高速なデータ処理能力が求められますが、画像データはデータ量が多く、画像の処理に時間がかかる場合があるため、リアルタイム処理では遅延を生じさせないことが課題です。
Depth SLAM
Depth SLAMは物体の深度をマッピングする技術です。例えば、ロボットが箱の中から物体を取り出す際、正確な深さが分からなければロボットは箱から物体をうまくつかめずに取り出せません。しかし、物体の深さが分かればどこをつかめばよいかが分かるため、箱から物体をうまく取り出せるようになります。この技術は手術などにも応用できるため、期待を集めている技術です。
深度を測定するには、超音波やレーザー光などを利用し、これらの超音波や光を当てて反射した情報から正確な3Dマッピングを行います。超音波やレーザー光を利用するため、暗闇でも使用できることもメリットです。結果は深度が濃淡で表された画像データで表示されますので、LiDAR SLAMとVisual SLAMの中間のセンシング技術ともいえます。
SLAMを支えるセンサの種類と選び方
以上のようにSLAM技術は大きく3つあり、それぞれの技術には得意とする分野がありますが、これらのSLAMの技術を支えているのがセンサです。ここでは、どのような種類のセンサがあるのかを解説するとともに、選び方も解説します。

見えるものの距離を計測する「カメラセンサ」
カメラセンサは光学レンズを通して外部の画像を取り込みデータ処理を行いますが、カメラを工夫することでさまざまな性能が得られます。その代表的な技術の一つがステレオカメラです。
ステレオカメラは、カメラを2台使用して立体的に捉えることで距離の測定を可能としています。一方、カメラを2台使用した場合、車載用などで使用すると振動などの要因により2台のカメラの位置、カメラ間の距離(基線長)、姿勢が初期校正時の設定から、外れる場合があるため、都度校正を行う必要があります。その点、最新のステレオカメラではソフトウェアを通して自動的に校正を行うようになっており、高精度のセンシングが可能となっています。代表的な高精度車載ステレオカメラには、Foresight社のScaleCam™があります。

また、Teledyne e2v社のCMOSイメージセンサTopazには、独自のCMOS技術が使用されています。独自のCMOSテクノロジーを用いて設計されているためノイズが少なく、正確な画像処理が可能で、SLAMのカメラのセンサとして能力を発揮します。

さらに、Teledynee2v社のTopaz5D™ CMOSイメージセンサは同社が提供するSDKを使用することで2D画像と3D深度データを同時に得ることが可能です。

遠赤外線カメラの活用も進んでおり、暗闇でもカメラを用いたVisual SLAMが可能となっています。遠赤外線カメラを使用できると、夜間でもドローン飛行が可能になり、SLAMの利用の幅が大きく広がることになります。高性能な遠赤外線カメラには、Teledyne FLIR社製の遠赤外線カメラBosonがあります。
Teledyne FLIR社製 Boson・Teledyne FLIR社製 Boson+

これら多種多様なカメラから適切なタイプを選択することで、ドローン・UAVのみでなく無人搬送車(AGV)への利用にも応用ができます。
タイミング制御性、計測・解析・判断などの精度を向上させる「ToFセンサ」
ToF(光の飛行時間・Time of Flight)センサは、発射した光が物体に反射し戻ってくる時間から距離を計測するため、リアルタイムの距離情報が取得できます。
光の速度は秒速30万kmといわれており、超高速で伝搬する光の反射を測定するには、非常に高度な技術が必要です。こうした測定を可能にしているのも、光の飛行時間(ToF)から対象物までの距離を取得可能なCMOSです。こうした距離測定ができるToFセンサとしては、Teledyne e2v社のHydra3Dがあります。

レーザーと光センサの技術を用いた「LiDAR」
LiDARセンサは、レーザー光源と光センサを組み合わせることで、物体までの距離を正確に測定する技術ですが、この組み合わせとスキャン方式の違いによって各LiDARセンサに独自の特徴が生まれます。たとえば、レーザー光源の種類や波長、光センサの感度によって測定距離や精度が異なり、スキャン方式によって測定範囲や動作速度が異なり、それに応じてさまざまな用途に適したLiDARセンサが開発されています。こうした多様な組み合わせから生まれるLiDARセンサの種類は、各製品が持つ特定の機能や性能に直結しており、それぞれの用途に最適化された特徴を持っています。
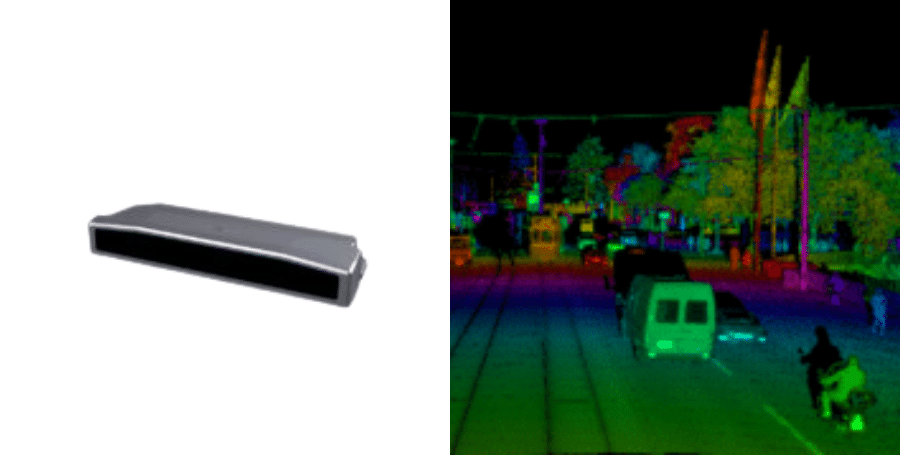
一例としては、LightWare製のLiDARは、小型・軽量であるにも関わらず検知範囲が約200m可能な高性能な点が特徴なので、多くのドローンやUGV、ロボットなどの無人機で活用されています。

また、自動車向けには、LUMINAR社のLiDAR Irisがあります。LUMINAR社の Irisは、遠方の対象物の位置を正確に把握し、対象物が何であるかを確実に認識し、カメラのような解像度の高さで、反射率が低い対象物でも確実に検知できる特徴を持つ、車載向け高性能LiDARです。
近距離で広範囲をカバーする「3D超音波センサ」
Depth SLAMでは超音波が使用される場合がありますが、この超音波を用いて深度マッピングができるセンサに、Toposens社のECHO ONEがあります。
ECHO ONEには、超音波の発生源に加え、反射した超音波を受信するマイクが3つ設置されています。このマイクで受信した超音波を独自のアルゴリズムで解析することで、広範囲かつ精度の高い深度マッピングが可能となっています。また、小型化および軽量化も実現しています。そのため、ロボットのLiDARを、3D超音波に置き換えたり、LiDARを補完する形で導入するといったケースが増えてきています。
位置・姿勢を推定する「IMUセンサ」
IMU(Inertial Measurement Unit)は、ジャイロスコープと加速度計を組み合わせて物体の位置や姿勢を推定するセンサです。
具体的には、ジャイロスコープは傾きを検出できるため、ロボットが体勢を崩した際にはこのジャイロスコープが効果を発揮します。加速度計は、落下の際など、ロボットが加速されたときに加速度を検知して何が起こっているのかを把握します。
IMUセンサの一例としては、InertialSense社のIMXシリーズがあります。InertialSense社のIMUセンサは安価で小型・軽量、かつ堅牢であるうえ、GPS機能が搭載されているタイプもあるため、姿勢制御のほか、位置情報を正確に把握できます。海外ではドローン・UAVをはじめ、ミサイルなどの防衛技術等にも使われています。

まとめ
SLAM技術の強化には適切なセンサの選定が不可欠です。各センサの特性とその役割を理解し、プロジェクトに最適なセンサを選ぶことで、SLAMシステムの精度と効率は向上します。また、センサの組み合わせによって、より高精度で効率的なSLAMシステムを構築することが可能です。
目的に応じて最適なセンサを選ぶことでSLAM技術を最大限に活用し、より高性能でクリエイティブな製品づくりを目指しましょう。
