


Related News 関連の最新情報

LightWare LiDAR、500m測距対応の小型・軽量LiDAR「GRF-500」を発表 – 測距性能と運用高度を大幅に向上 –
弊社が国内で代理店を務めるLightWare LiDAR(本社:アメリカ、以下ライトウェア ライダ社)が、500m測距対応のmicroLiDAR「GRF-500」を発表したことをお知らせします。 ライトウェア ライダ社は […]

microLiDARを展開するLightWare LiDARとコーンズテクノロジー株式会社が代理店契約を締結
コーンズテクノロジー株式会社と小型・軽量かつ高性能なmicroLiDAR®の開発・提供を行うLightWare LiDAR(本社:アメリカ、以下ライトウェア ライダ社)は、このたび、販売代理店契約を締結したことをお知らせ […]
最新テクノロジーのご紹介
Product Information 製品情報
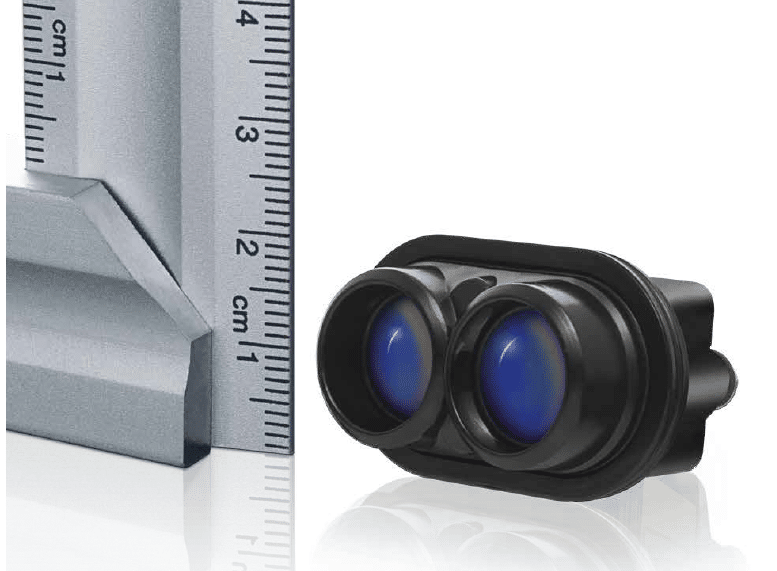
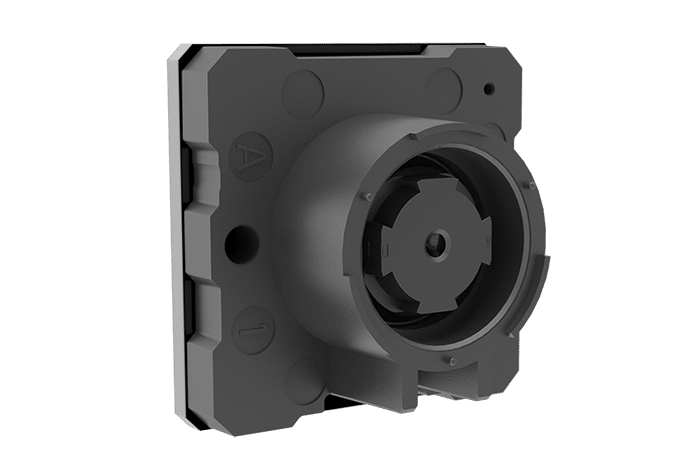
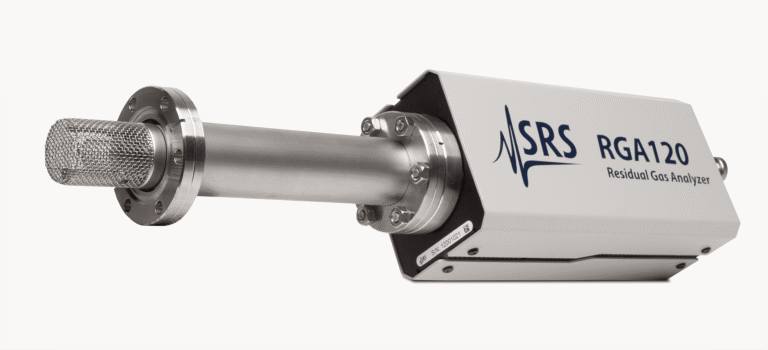
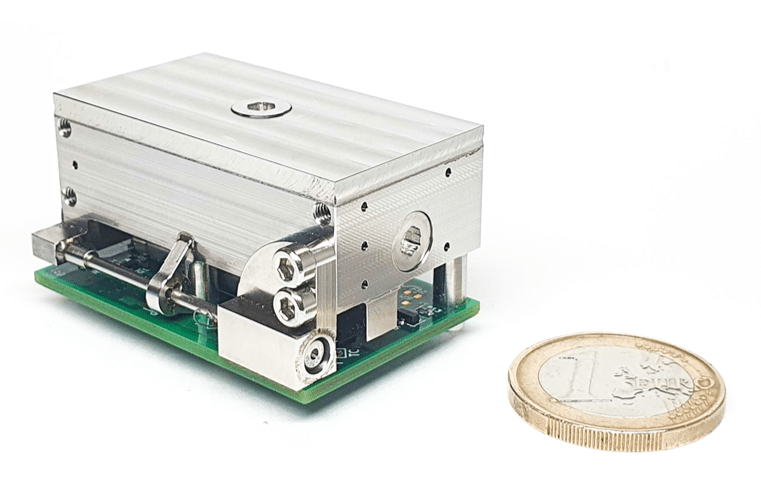
LightWare LiDAR社は小型、軽量かつ高性能なLiDARセンサのパイオニアで、高品質な製造プロセスにより毎月数千個のセンサを生産しています。
同社のmicroLiDARセンサはUAVおよびUGVでの「AGL」「離着陸支援」「地形追従」「位置保持」「検出・回避」「SLAM」「ジンバル測距」や、セキュリティセンサや交通監視をはじめとするIoTなどのアプリケーションに最適なセンサです。
※SF23/Bは生産終了(EOL)が決定しており、販売は2025年12月28日までのため2025年10月30日までに弊社へのご注文を頂く必要がございます。
また、2027年12月30日でメーカーサポート終了予定となっております。
製品概要
- 小型、軽量かつ高性能なmicroLiDAR
- 検知範囲: ~500m
- PX4, ArduPilot, Arduino及びRaspberry Piなどのシステムへ統合可能
アプリケーション
- UAV・UGV
- 自動離着陸アシスト
- SLAM
回り込み回避(公開ページにはこのパーツ表示されません)
microLiDARセンサ アプリケーション解説動画
Lighware LiDAR社のmicroLiDARセンサが可能にする「AGL」「離着陸支援」「地形追従」「位置保持」「検出・回避」「SLAM」「ジンバル測距」について、動画で解説します。
AGL(Above Ground Level)
AGL(Above Ground Level:地上高度測定)に必要な測定範囲と高精度なデータを提供します。これらは、航空当局が課す高度制限の遵守や、自動離着陸の実現に不可欠です。また、写真測量での物体のスケール調整や、ドローンのホバリングを使った点検・監視用途でも重要な機能です。
離着陸支援
確なAGLにより、過酷な環境下でも信頼性の高い自律離着陸を可能にします。
回り込み回避(公開ページにはこのパーツ表示されません)
地形追従
microLiDARセンサを機体の下向きに搭載することで、地形の変化を常に把握できます。microLiDARセンサからのデータを使用し「地形追従(Terrain Following)」「地形認識(Terrain Awareness)」を行いながら、地上高度を適切に維持し飛行を続けることで、農業、測量、地学分野で活用できます。
位置保持
特定の対象物から安全な距離を保ちながらの飛行や一定の高度でのホバリングを、microLiDARセンサを下向き・前向きに設置することで実現します。この技術は、風力タービンやインフラ設備の点検、鉱業や農業における測量、監視用途などで様々な成功事例があります。
回り込み回避(公開ページにはこのパーツ表示されません)
検出・回避
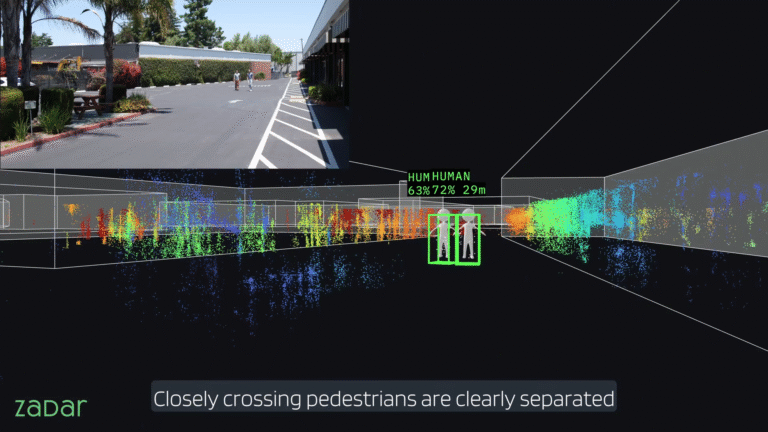
UAV(無人航空機)やUGV(無人地上車両)は、静止している物体(樹木、電柱、送電線、階段、マンホールなど)だけでなく、移動する物体(鳥、他のドローン、人など)を検知し回避することを求められます。microLiDARセンサは、長距離測定能力、独自の測定技術、高速なデータ更新率により、確実に進行方向にある障害物を検知・回避できるよう設計されています。
SLAM
microLiDARのスキャニングは、SLAM用に連続的なデータを操縦者・自動操縦システムに提供します。これにより、GPSが利用できない環境(屋内、地下、狭い空間など)でも自律的な運用が可能になります。SLAM技術を活用することで、UAVやUGVは環境のマッピングを行いながら自己位置を特定し、固定または移動する障害物との相対位置を継続的に測定しながら安全な移動を実現します。
回り込み回避(公開ページにはこのパーツ表示されません)
ジンバル測距
ジンバル測距とは、LightWareのレーザー距離計(LRF)をEO/IR(電気光学/赤外線)ジンバルと合わせて使用することで、距離測定、仰角、方位角データなどを取得することができる方法です。この方法により、重要な奥行き情報を提供することで、カメラシステムの機能を強化し、観測対象の正確な位置特定を可能にします。
回り込み回避(公開ページにはこのパーツ表示されません)
製品ラインナップ
| 製品型番 | 範囲 | 精度 * | 更新レート | 信号処理 | 重さ | サイズ | インターフェース | インテグレーション | IP 定格 | |
|---|---|---|---|---|---|---|---|---|---|---|
SF000/B
|
0.2~50 m | ±5 cm | 48~388 readings per second | First and last pulse available | 9.81 g | 24 x 34 x 20 mm | Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | ユニット IP40 | 前面 IP65 |
SF20/C
|
0.2~100 m |
±5~ 10 cm |
48~5000 readings per second | First and last pulse available | 7.4 g | 30 x 20 x 32 mm | USB, Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | ユニット IPなし | 前面 IP65 |
|
SF20/HA
|
0.2~100 m |
±1~ 10 cm |
48~1250 readings per second | First and last pulse available | 7.5g | 30 x 20 x 32 mm | USB, Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | ユニット IPなし | 前面 IP65 |
|
SF20/HA
|
0.2~100 m |
±1~ 10 cm |
48~1250 readings per second | First and last pulse available | 7.5g | 30 x 20 x 32 mm | USB, Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | ユニット IPなし | 前面 IP65 |
|
LW20/C |
0.2~100 m |
±5~ 10 cm |
48~5000 readings per second | First and last pulse available | 19 g | 30 x 20 x 43 mm | Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | IP67 | |
|
LW20/HA
|
0.2~100 m |
±1~ 10 cm |
48~1250 readings per second | First and last pulse available | 19.5 g | 30 x 20 x 43 mm | Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | IP67 | |
|
LW20/HA
|
0.2~100 m |
±1~ 10 cm |
48~1250 readings per second | First and last pulse available | 19.5 g | 30 x 20 x 43 mm | Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | IP67 | |
SF23/B
|
0.2~50 m | ±10 cm | 1~20 readings per second | First pulse only | 6.5 g | 32 x 30 x 22 mm | Serial UART (3.0V logic), shutdown and control | Arduino, Raspberry Pi and LightWare Studio | ユニット IPなし | 前面 IP65 |
SF30/C
|
0.2~100 m |
±5~ 10 cm |
39~20000 readings per second | First and last pulse available | 29.42 g | 30 x 56 x 50 mm | USB, Serial UART (3.3 V TTL, 5 V tolerant) |
Arduino, Raspberry Pi, and LightWare Studio | ユニット IP40 | 前面 IP65 |
SF30/D
|
0.2~200 m |
±5~ 10 cm |
39~20000 readings per second | First and last pulse available | 31.53 g | 30 x 56 x 50 mm | USB, Serial and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Raspberry Pi and LightWare Studio | ユニット IP40 | 前面 IP65 |
|
GRF-250 |
0.2~250m | ±50 cm | 1 ~ 50 readings per second | First and last pulse available | 10.65g | 32 x 31 x 20 mm | USB, Serial UART and I2C (3.3V TTL, 5V tolerant) | Pixhawk, PX4, Raspberry Pi, Arduino(アクセサリ要) and LightWare Studio |
ユニット |
前面 IP67 |
|
GRF-500 |
0.2~500m | ±50 cm | 0.5 ~ 10 readings per second | First and last pulse available | 10.7g | 32 x 34 x 21 mm | USB, Serial UART and I2C (3.3V TTL, 5V tolerant) | Pixhawk, PX4, Raspberry Pi, Arduino(アクセサリ要) and LightWare Studio |
ユニット |
前面 IP67 |
SF45/B
|
0.2~50 m |
±5~ 10 cm |
Up to 5000 readings per second and 5 sweeps per second | First and last pulse available | 57.94 g | 51 x 48 x 44 mm | USB, Serial UART and I2C (3.3 V TTL, 5 V tolerant) |
PX4, ArduPilot, Arduino, Ros, Raspberry Pi and LightWare Studio |
ユニット IP42 | |





※精度は更新レート、ユニット内温度により異なります。
カタログ・資料
最先端技術の知見豊富な
コーンズテクノロジーまで
Products 製品を探す
業界・用途別

















































































































































































































































本製品についての
お問い合わせはこちら
ご覧いただいている製品の仕様にご不明点がある方は、お気軽にお問い合わせください。
当社スタッフが必要な条件・用途をお伺いした上で、最適な製品をご提案いたします。
