アクティブ/ハイブリッドロードプルによる ハイパワーデバイスの特性評価とモデル化
1. はじめに
RFパワーデバイスの特性評価には従来からロードプル測定と呼ばれる測定手法が使われている。ロードプル測定は、被測定物であるRFデバイスに対して負荷インピーダンスを変化させて測定を行うもので、被測定物の出力や効率等が最大となる負荷を求める為や、シミュレーションに使用するデバイスモデルの確認等の目的で使われている。
1980年代に自動チューナシステムが登場してから最近までは、特殊なケースを除いては機械式チューナが用いられることが一般的であった。しかし、近年新たな技術が採用されるなど、従来のロードプルでは実現できなかった測定が可能となってきている。
ロードプル測定の基礎から最新のアクティブ/ハイブリッドロードプルについて解説する。
2. 従来のロードプル測定システム
整合回路を設計する場合、デバイスが小信号動作で使われるのであればSパラメータに基づいて回路設計をすることができる。しかし、大信号動作ではデバイスへのRF入力レベルによって、出力パワーが最大となる負荷インピーダンスが異なる為、小信号で測定されたSパラメータを使用することはできない。そこで、実際に負荷インピーダンスを変化させながら測定を行い、最適な負荷を見つけ出すロードプル測定が必要となってくる。
一般的なロードプルシステムは図1のような構成をとる。 被測定物の前後にインピーダンスチューナを配置することで、信号源側のインピーダンスと負荷側のインピーダンスが可変できるようになっている。
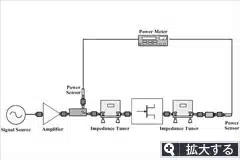
図1
機械式チューナによるロードプルシステム
機械式チューナは、エアラインの中心導体に対してプローブと呼ばれる金属部品を近づけていくことでインピーダンス・ミスマッチを発生させる。図2に示す様に、プローブの上下動により、反射波の振幅を変化させることが出来、また、中心導体に対して平行にプローブを移動させることで反射波の位相を変化させることが出来る。
機械式チューナの2ポートSパラメータを様々なプローブの位置において事前に取得しておくことで、デバイスから見た負荷インピーダンスを既知のものとすることができる。

図2(a) 機械式チューナの構造
デバイスのRF出力電力Poutはロード・チューナの後ろに設置されたパワーメータで測定する。パワーメータの指示値に対して、既知であるチューナのSパラメータを用いて補正を行うことにより、デバイス出力端でのPoutを求めることが出来る。
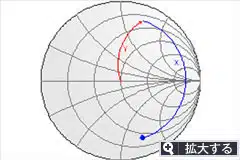
図2(b) 機械式チューナの動作
3. ベクトルレシーバー・ロードプル
ベクトルレシーバー・ロードプルとは、端的に言えばパワーメータに代えてベクトルネットワークアナライザを使用して測定を行うロードプルシステムである。
ネットワークアナライザを使用することにより、デバイスの入力インピーダンスを測定することが可能となり、その結果としてデバイスの真の利得とも言うべきパワーゲインGpを求めることが可能となっている。
従来のロードプルでは、測定精度はロード・チューナのSパラメータ再現性に依存しているが、ベクトルレシーバー・ロードプルでは、デバイスとインピーダンスチューナの間にカプラを配置することにより、デバイスから見た負荷インピーダンスを動的に測定可能となっている。これはチューナのSパラメータ再現性に伴う測定誤差を排除できるというメリットもある。
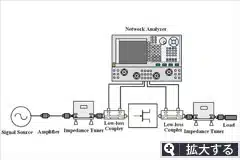
図3 ベクトルレシーバー・ロードプルシステム
4. アクティブ/ハイブリッド-アクティブ・ロードプル
アクティブチューナは、図4のように信号の位相と振幅が制御可能なRF信号源と増幅器により構成される。デバイスからのRF出力に対し、反射波に相当する信号をアクティブチューナで発生させデバイスの出力端へ注入することでインピーダンスチューニングを行う。
機械式チューナの場合、反射波は前述のとおりエアラインに挿入されるプローブにより作られる。そのため、仮にデバイスからプローブの間に全く損失が無いと仮定しても実現可能な反射係数Γは1が最大である。現実には損失が大きくなると、それに伴って反射係数Γは小さくなってしまう。
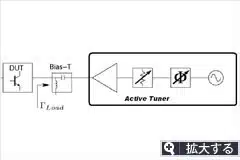
図4 アクティブチューナ
特にオンウエハ測定の場合はデバイス~チューナ間に存在するRFケーブルやRFプローブのロスにより、デバイスから見たチューナのチューニング可能範囲は狭くなってしまう。
一方、アクティブチューナの場合は、アクティブチューナの出力信号レベルを大きくすることで反射係数を大きくすることができる。
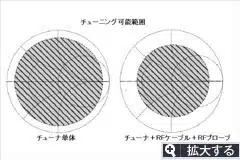
図5
ケーブルロスのチューニング可能範囲への影響
図6はハイブリッド-アクティブロードプルシステムの例であるが、基本的な構成はベクトルレシーバ・ロードプルとほぼ同じである。
違いはロード側の機械式チューナの後ろにアクティブチューナを構成するアンプとRF信号源が取り付けられていることである。
ハイブリッド-アクティブチューニングは、デバイスが出力するRF信号の振幅と位相をモニタし、同時に反射波の振幅と位相もモニタしつつ、デバイスから見た負荷インピーダンスが所望のものとなるよう機械式チューナとアクティブチューナを制御することでインピーダンスチューニングを実現するものである。
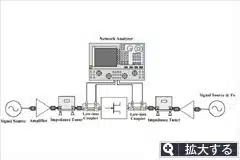
図6
ハイブリッド-アクティブロードプルシステム
5. Xパラメータロードプル
Xパラメータは非線形領域での振舞いを表現するもので、Xパラメータを測定することで非線形シミュレーションを容易に実行することが可能となる。測定するだけで非線形シミュレーション用モデルが得られることは、パワーアンプの開発現場においては大きなメリットとなる。
Xパラメータが測定可能なNVNA(Nonlinear Vector Network Analyzer)が発売されてほどなく、ロードプル測定を行いながらXパラメータを測定するシステムがAgilent Technologies Inc.とMaury Microwave Corp.によって開発され、2008年に発表された。当初は機械式チューナのみの対応であったが、現在では前述のアクティブ/ハイブリッド・アクティブロードプルシステムにも対応し、より広範囲のデバイス測定・モデリングに利用可能となっている。
文 献
[1] G. Simpson, J.Horn, D.Gunyan,D.Root,“Load-Pull + NVNA = Enhanced X-Parameters for PA Designs with High Mismatch and
Technology- Independent Large-Signal Device Models” IEEE ARFTG 2008
[2] Steve Dudkiewicz ,“Hybrid-Active Load Pull with PNA-X and Maury Microwave”, 2012



