Sightline Intelligence SLA-1750 監視・防衛向けサーマルカメラシステム構築例-Teledyne FLIR NeutrinoをSLA-1750で制御
- 事例

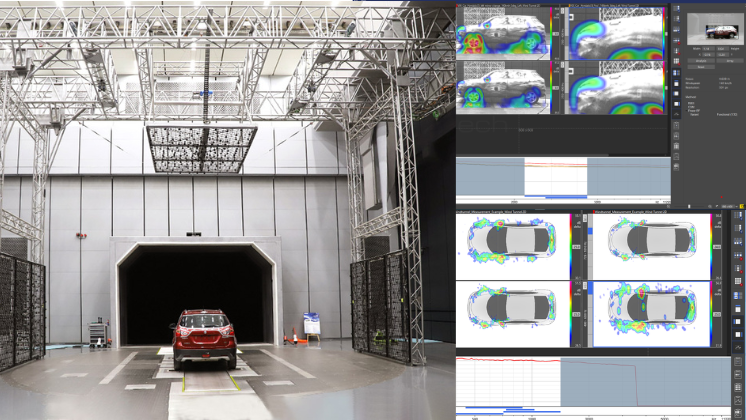
監視・防衛用途のサーマルカメラシステムでは、カメラコア単体の性能だけでなく、どのように映像を取り込み、処理し、制御し、外部システムと連携させるかが、カメラシステムの完成度を大きく左右します。Sightline Intelligence社のSLA-1750は、Teledyne FLIR社のBosonやNeutrinoといったサーマルカメラコアを比較的容易に統合し、映像出力、トラッキング、ズーム制御などを一体で扱えるプラットフォーム(画像処理ボード)です。
本記事では、実際にSLA-1750にNeutrino LCをSLA-1750を接続し、初期設定から映像取得、ズーム制御に至るまでの具体的な構成と注意点、そして撮影動画を紹介します。
監視・防衛用途向け画像処理ボード、Sightline Intelligence
Sightline Intelligence社※は、監視カメラ、航空機あるいはドローンに搭載されるカメラに要求される機能を、ハードウエアとソフトウエアのトータルで提供するメーカーです。振動補正などの画像フィルタ、オブジェクト検出といった画像処理、GNSS/IMUとの連携によるKLV(Key, Length, Value)メタデータを出力、フォーカス・ズーム・パンチルト制御なども行えます。
※Sightline Intelligence社は、旧社名Sightline Applications社が、2025年4月に豪Athena AI社を買収して生まれた企業です
SLA-1750の構成と位置づけ
今回使用するSLA-1750は、Sightline Intelligence社の画像処理ボードです。SLA-1750はNXP社i.MX8を使用し、i.MX8 SOMと、各種のカメラインターフェース(CameraLink、CMOS parallel、MIPI、HD-SDI、HDMI、USB、アナログ…)、I/Oを搭載するキャリアボードを組み合わせて構成されており、その中のSOMとキャリアボードである1750-OEMがコアになります。

ソフトウエア面では、Video Trackというアプリケーションによって、最大2台のカメラから、一台、h.264あるいはh.265でエンコードした動画像を、RTPまたはMPEG2-TSストリームとして出力することができる性能があります。先ほど述べたフォーカス・ズーム制御、KLVメタデータ作成なども行えます。
製品シリーズとしては、同じくi.MX8を搭載したSOMを用い、2台のカメラ画像を2ストリーム出力することができるSLA-1710、より高性能な、3台のカメラ画像を2ストリーム出力することができるSLA-4100があります。
監視・防衛用途でのサーマルカメラコアの選択肢、Teledyne FLIR社 Boson・Neutrino
Tledyne FLIR社(以下FLIR社)には、サーマルカメラコアとして、LWIR用のBoson / Boson+、Leptonと、MWIR用のNeutrino LC / SX / QXというシリーズがあります。VoSPIを必要とするLepton以外の製品は、Video Trackでサポートされており、基本的な機能をかなり簡単に使用することができます。
Bosonシリーズ

Neutrinoシリーズ

回り込み回避(公開ページにはこのパーツ表示されません)
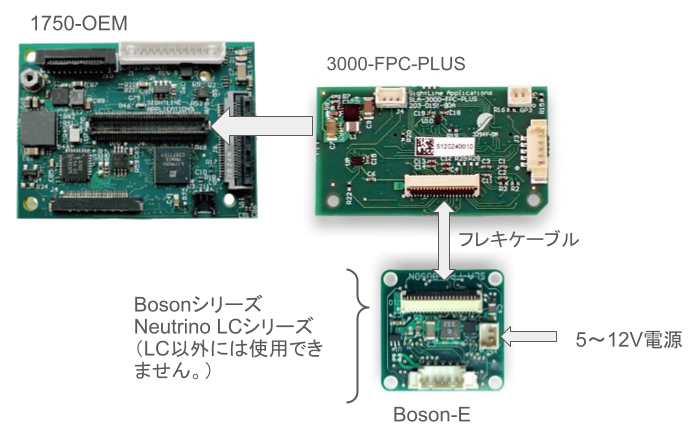
Neutrino LCは、基本的に、CZ(continuous zoom:ズーム)付きレンズを搭載しており、固定フォーカスのレンズとしては1種類しか設定がありません。今回使用するのは、Neutrino LC、ISシリーズの、Neutrino LC CZ19-290になります。このカメラ+CZユニットは、D = 13.9 km, R = 5.4 km, I = 4.1 kmという性能を持ちます。Sightline Intelligence社のボードとは、Boson-Eという専用のVPC(要外部電源)あるいはFLIR社・当社製作のVPCを用いて接続します(Neutrino LC以外のNeutrinoシリーズでは、Boson-Eを使用することはできません)。
なお、Bosonシリーズのうち最も基本的性能のBoson2.0に温度測定機能を追加したBoson Radiometryというものがあります。こちらも、Sightline Intelligence社のボードとは、Boson-E、またはFLIR社・当社製作のVPCを用い、USBで接続可能です。
NeutrinoLCとSLA-1750の接続、設定、各種制御
今回は、NeutrinoLCを接続する前提ですので、SLA-1750の評価キットである1750-EVALを使用します。1750-EVALは、1750-OEMと、HD-SDIカメラI/F、MIPIカメラ接続用の4000-MIPI-IN及び電源・ethernet接続を行うSLA-DIST及び必要なケーブルで構成されています。
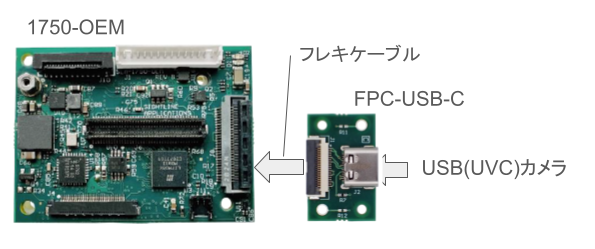
Neutrino LCはBoson世代のハードウエアで、インターフェースも共通です。従い、Boson用のインターフェースボードBoson-Eを使い3000-FPC-PLUSを経由して使用する方法と、USBを使って接続する方法の2通りを選ぶことができます。
3000-FPC-PLUS + Boson-E
USB
回り込み回避(公開ページにはこのパーツ表示されません)
VideoTrack設定時の注意点、カメラ初期化
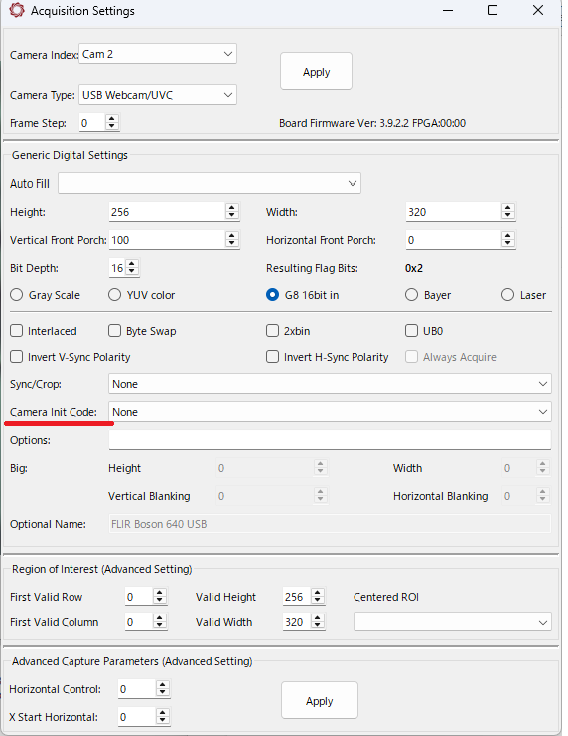
VideoTrackソフトウエアは、設定されているカメラの検出時に初期化を行おうとします。次のダイアログは、インターフェースに接続されているカメラの取り込み設定画面で、赤線部にあるコマンドを用いてカメラを初期化しようとします。この例では、USBポートにあるBoson320の接続に関する設定で、Bosonに設定している出力モード(PreAGC、TStable、TLinear、PostAGC)をそのまま使うよう「None」としています。
Auto fillには、Boson~がリストにありますが、それを選択した場合、Camera Init codeには、BosonをPreAGCモードに設定するためのコードが現れ、それが実行されるため、あらかじめBosonに設定したモードはリセットされてしまいます。
本来、Auto fillは、Video Track自身が持つISP機能を利用して、接続されているカメラを最大限活用できるモードに設定するようになっています。Bosonの場合、PreAGCモードに初期化することによって、Enhanceタブで設定するAGCモードやISP機能を利用するためです。結果として、Boson自身の組み込み機能や、Radiometry、それを利用するisothermといった機能を予め設定していても、使用できなくなってしまいます。つまり、Bosonをどのモードで動作させ、必要に応じてどのような初期設定を行っておくかについて、計画を立てておく必要があります。
なお、Boson・NeutrinoはいずれもSDKを用い、動作モード設定用のアプリケーションを作成することができます。例として、FLIR社自身がBoson用に公開しているrawBosonというアプリケーションが存在します。Video Trackに初期化を行わせた場合でも、必要に応じ動作モード設定用のアプリケーションをビルドして1750上にセットしておけば、後に、端末からコマンドを用いてBosonの動作モードを調整することが可能です。
SLA-1750でのズームおよびフォーカス制御
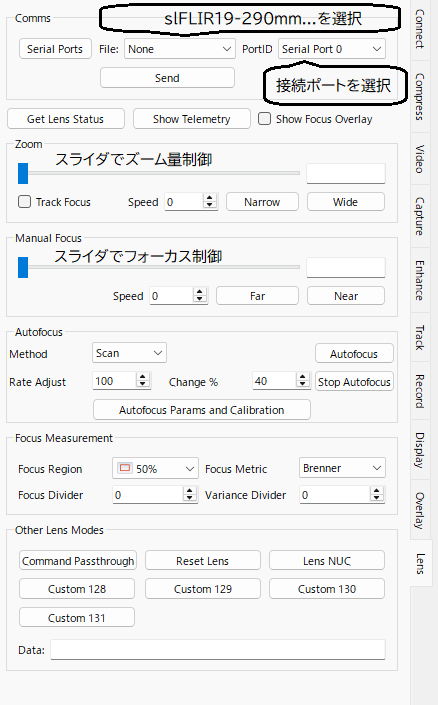
前述のとおり、Neutrino LCはほとんどの場合ズームレンズが搭載されています。VideoTrackには、ズームおよびフォーカス制御をおこなうサンプルアプリケーションが搭載されています。“Neutrino LC CZ19-290”を使用します。CZの制御インターフェースはRS-232Cですから、SLA-1750の場合、Serial1または3に、RS-232Cドライバを搭載して接続してやります。サポートされているレンズであれば、オートフォーカスも接続するだけで非常に簡単に運用することができます。
Neutrino LCとSLA-1750を使った実際の撮影動画
次のビデオは、当社(北緯139.74799 東経35.65283)11Fから、丹沢方向を撮影したもので、フォーカスには調整の余地がありそうですが、もっとも引いた状態では霞んでいた山々が、ズームしていくとだんだん尾根が見えるようになっていきます。
まとめ
監視・防衛用途では、追跡できること、制御できること、情報として扱えることが求められます。
Sightline Intelligence社の画像処理ボードは、FLIR社のサーマルカメラと組み合わせることで、画像取得にとどまらず、トラッキング、KLVメタデータ出力、レンズ制御までを含めた統合的なカメラシステムを構成することができます。本記事で紹介した構成例や注意点が、MWIR/LWIRサーマルカメラを用いた監視・防衛システム設計の一助となれば幸いです。